На главную
|
|
Прошло 145 лет с тех пор, как в 1864 г. фрегат-капитан Джованно (Иоганн) Бьяджо Луппис, встретившись с владельцем механического завода в Фиуме Робертом Уайтхедом, предложил ему идею и чертежи самодвижущейся подводной мины. Луппис , которому достались чертежи умершего в 1859г. австрийского офицера, пытался создать самодвижущуюся мину, поражающую вблизи берега корпус военного корабля. По замыслу изобретателя подводная мина должна поражать корабль, подводным взрывом разрушая его. Луппис, потратил четыре года на осуществления этого проекта. Он предложил Уайтхеду с его возможностями, техническими знаниями реализовать идею подводной самодвижущей управляемой мины. Изобретение заинтересовало Уайтхеда, проводя испытания разработанной усовершенствованной мины в бухте Риеки, он представил «торпеду» в 1868г. австрийскому флоту. Разработка нового морского оружия, совпала с появлением в военных флотах бронированных кораблей. Паровые машины и котлы, экипаж таких кораблей надёжно прикрывались броневыми листами. Нужны были новые виды морского оружия способные уничтожать такие корабли. Правительственная комиссия Австро-Венгерского военного флота после испытания торпеды рекомендовала принять её на вооружения военного флота, как оружие ближнего боя поражающая уязвимую подводную часть бронированных кораблей. Торпеда Уайтхеда, имеющая диаметр 355мм. длину 3530мм. приводилась в движения пневматическим двигателем, работавшим от сжатого воздуха с давлением 25 атм. Винт торпеды позволял при скорости 6 узлов преодолевать под водой расстояние 200 метров. Гидростатический аппарат, который Уайтхед изобрел, удерживал торпеду на заданной глубине, регулируя под водой ход на глубине до 3 метров, весила она 140кг. Австрийское правительство, заплатив изобретателю 20 тысяч стерлингов, приобрела патент на производства, разрешила продавать торпеду другим заинтересованным в приобретении такого оружия странам, с выкупом патента у изобретателя в 1871г. Уайтхед усовершенствовал торпеду, в этом ему помог англичанин Питер Брозерхуд спроектировавший трехцилиндровый двигатель мощностью 40 л. с. обеспечивший дальность хода 600 м, при скорости 20 узлов. Два вращающихся в разных направлениях соосных винта существенно снизили отклонение по курсу. «ТОРПЕДА» из Риеки создала филиалы по всему миру. В Риеке (Фиуме) существует музей, в котором представлены первые торпеды, разработанные Робертом Уайтхедом. Торпеда, состоящая из четырех соединяющих между собой частей: зарядного отделения и взрывателя боеголовки I, воздушного резервуара II, кормового отделения с машиной вращающей винты, гидростатом глубины III, хвостовой части с гребными винтами хвостовыми оперениями, рулями управления IV, разработанная Уайтхедом на долгие годы стала основным морским оружием ближнего применения. Эти первые самодвижущие подводные мины и современные ракета - торпеды вот путь, который прошла торпеда, занявшее достойное место на боевом корабле. Во Второй мировой войне торпедное оружие превратило подводную лодку в грозного противника, против торговых судов и кораблей, отправив на дно 63,8 % уничтоженного тоннажа торговых судов и 38,5 % кораблей. В Германии с 1930 по 1945гг., разработали 16 типов различных торпед. Основными применяемыми с подводной лодки торпедами были: электрическая G7e и парогазовая G7а. Они имели стандартный калибр 533мм, длина такой торпеды 7,186 м. Подводные лодки Германии израсходовали свыше 10 тыс. таких торпед. Торпедные заводы в Берлине. Бремене. Киле. Дрездене круглосуточно пополняли арсеналы смертоносными «угрями» - торпедами. Эффективность попадания торпеды в скоростной корабль заставила разработчиков на основе исследования акустических полей разработать аппаратуру самонаведения, разместив её в корпусе. Достоинством пассивной акустической аппаратуры, размещенной в электрической торпеде, является бесследность хода, а также сравнительно малые габариты и вес размещенной аппаратуры самонаведения. Такая торпеда была впервые изготовлена в Германии в 1942г. Разработкой акустических самонаводящихся торпед в Германии начали заниматься в начале 1933г. В исследовании принимали участия : электроакустическое общество Киля. Компания электроакустической и механической аппаратуры Берлина. «Атлас – Верке» Бремен. Фирма «Сименс и Гальске» Берлин. Торпедо исследовательский институт Ной – Бранденбург. Испытательная станция Гатенхафена и другие фирмы. Торпедная комиссия под руководством профессора Кюпфмюллера , главного инспектора торпедного оружия контр – адмирала Куммеца руководила работами акустического самонаведения пассивной торпеды. Такие работы проводились в Великобритании СССР. США. Перед войной такую аппаратуру установили в парогазовой торпеде российского производства «53 – 38», но собственные шумы оказались очень значительными и не смогли обеспечить нормальную работу даже при снижении скорости до 30 узлов. С шумами от винтов носителя, с этой проблемой столкнулись все разработчики самонаводящихся торпед. Разработанная в Германии торпеда с системой самонаведения Т IV Falke впервые использовалась в феврале 1943г.
Эта торпеда T IV Falka имела скорость 20 узлов, вес 1495 кг. Электродвигатель, работала от батареи, которая выдавала напряжение 104 V, и ток 700 А, дальность хода такой торпеды около 7500 м, калибр 533 мм, длина 7,163 м., боеголовка несла 274кг. ВВ. Расположенные в носовой части гидроакустические преобразователи прослушивали акустические шумы судов, идущих в конвои. Из-за невысокой скорости в основном эта торпеда предназначалось для уничтожения торговых судов. Звуковое акустическое оборудование реагировало на торговые суда, идущие со скоростью 5 – 13 узлов, аппаратура работала на низких звуковых частотах. Торпеда была прямоидущей, при прохождении первых 400 метров включалась аппаратура самонаведения и неконтактный взрыватель KHB Pi2. Сохранилось мало документов об этой торпеде. Опытная станция Гетенхафен, на которой она собиралось в экспериментальном цехе, была уничтожена, архивы, документация не сохранились. Создать, такую аппаратуру самонаведения не простая задача. Для этого требовалась радиоэлементная база: электронные малогабаритные лампы, реле, диоды, конденсаторы, дросселя, резисторы.
На их основе конструктора разработали и изготовили приемно-усилительные схемы, в которых выделялось напряжение полезного сигнала на исполнительные механизмы, к вертикальным рулям наводя торпеду на цель по акустическому полю от винтов и работающих машин торгового судна. Вода, обтекающая корпус создавала гидродинамические шумы, которые улавливались гидрофонами на значительном расстоянии. Гидрофоны, размещенные в носовой части прослушивали в секторах + 150< > 500 относительно продольной оси торпеды шумы судов, выдавали сигналы на усилительные схемы. Углы + 00< > 150 не прослушивали акустическое поле, и это было существенным недостатком Т IV Falke. В списке литературы (7) приведены потери торговых судов от Т IV Falke, использовали не более 30 таких торпед в боевых пусках с подводных лодок. 23 февраля 1943 г. подводная лодка U382 выпустила одну акустическую торпеду Т IV Falke, одну с движением зигзага с FAT, две G7e. По услышанным взрывам на лодке считали два попадания, в танкер и пароход , но был поврежден только танкер Murena водоизмещением 8252 тонн. В марте подводные лодки U221. U603. U758. применили акустические электрические торпеды Т IV Falke в нападении на конвой НХ-229, потопив несколько пароходов и теплоходов. Торпеды собирались, и настраивалась в Гатенхафене, сдавались ВМФ. Здесь же на курсах осваивал торпеду обслуживающий персонал. Обучали регламентным работам с торпедой перед загрузкой на подводную лодку, изучали документацию. В Польше в Гданской бухте в Гдыне (Гатенхафене) проходили показательные пуски торпед. Суда HOLZAPEEL водоизмещением 1200 тонн, имеющие скорость 12 - 13 узлов и FREIBORG, скорость которого составляла 9-10 узлов, пускали торпеду, в ночное время имеющую осветитель в носовой части, демонстрировав возможности торпеды. Дальность пуска составляла, как правило, 2-3 км. Торпеда проходила под корпусом FREIBORGA, на котором находились курсанты и обслуживающий экипаж, возвращалась, проходя 400-600 метров, развернувшись на 1800 опять проходила под кораблем, это повторялось до полного разряда ее батарей. Торпеда всплывала, её поднимали на борт. На фотографии, которая приведена в этой статье, отчетливо видна головная часть, в которой были размещены гидрофоны, система самонаведения, боевое зарядное отделение пассивной акустической торпеды, с неконтактными взрывателями индукционного действия, усилителями напряжения, вырабатывающими электрические сигналы при прохождении торпеды под корпусом корабля. В индукционном взрывателе срабатывало электронное реле, напряжение вводило первичный запал в действия. Первичный запал вставленный в запальный стакан в котором находилось ВВ, приводил в действие вторичный запал менее чувствительный к детонации. Подрыв боевого заряда осуществлялся ступенчато, уменьшая опасность взрыва от первичного запала. Как работает такой взрыватель описано в книге ( 3,6 ) и интересующиеся боле подробно работой такого взрывателя могут ознакомиться, прочитав об этом.
В средней части торпеды находилась батарея свинцово-кислотных аккумуляторов, которая при пуске торпеды вращала электродвигатель, преобразующий электрическую энергию батареи в механическую энергию для двух гребных винтов. Работал такой электродвигатель max 15 минут, при работе его следует учитывать плотность электролита, его температуру в аккумуляторной батарее, это влияла на скорость и дальность. За электродвигателем в хвостовом отсеке находились приборы управления глубиной хода торпеды, гироскоп, аппаратура управляющая рулями торпеды на начальном курсе и при самонаведении. Здесь расположен пусковой контактор, включающий и подающий ток на электродвигатель. В момент выстрела из торпедного аппарата подводной лодки в торпеде откидывается курок и открывается перепускной клапан. Воздух высокого давления через этот клапан поступает из воздушного баллона в пневматическое устройство контактора и замыкает контакты. Происходит замыкание силовой цепи и пуск электродвигателя. У торпеды Т IV Falke имелись клеммы, через которые производилась периодически подзарядка батарей, а также замеры тока, сопротивления изоляции. В хвостовой части, как и у всех торпед, находился гидростатический прибор курса, в который перед пуском торпеды задавали глубину хода, и гироскопический прибор, управляющий курсом при наведении торпеды на цель. Арретирующее устройство – для установки главной оси гироскопа в нужном направлении при разгоне ротора и для предотвращения повреждения при транспортировке. Специальная турбина при пуске торпеды раскручивала ротор гироскопа до 20000 об/мин и поддерживала обороты ротора во время движения торпеды на курсе. Торпеда сближалась с целью до захвата гидрофонами. Сигналы с гидрофонов о положении торпеды к цели, передавали управление рулевой машине от аппаратуры самонаведения наводя, корректируя торпеду. Конструктивно прибор курса комбинированный, на начальном участке гироскоп сближает торпеду к цели, при захвате гидрофонами прибор курса управлял рулями торпеды. В рулевой машине поршень рулей, управляемый воздухораспределительным золотником перемещаясь, перекладывал вертикальные рули. Напряжение сигналов с реле обеспечивало подачу напряжения на электромагнит, сдвигал золотник. В собранном состыкованном виде доступ к агрегатам и их осмотр, замеры, был возможен через специальные горловины на корпусе торпеды, которые после всех окончательных приготовлений наглухо закрывались. В хвостовой части Т IV Falke были два гребных двухлопастных винта и рули управления вертикальные и горизонтальные.
|
|
|
|
Недостатки Т IV Falke заставили разработчиков повысить технические характеристики торпеды. Прежде всего, надо было уменьшить «мертвый угол» в равносигнальной зоне направленности. Это сужало сектор, и прослушивание довели до + 20< >300 в диаметральной плоскости торпеды. Удалость увеличить скорость, её довели до 24 узлов. Разработали новые усилительные блоки, это позволила повысить чувствительность сигнала с гидрофонов, уменьшили габариты размещения аппаратуры самонаведения, повысили надежность и безотказность в эксплуатации.
Гидрофоны, расположенные в плоской носовой части были выполнены из никеля, имели четыре сердечника, на которые были намотаны витки медного провода. Подбором витков удалось сделать более острой диаграмму равносигнальной зоны. Система самонаведения изложена в литературе (1,3)
Основные параметры магнитострикционного гидрофона чувствительность, частотные характеристики, характеристики направленности удалось настроить, создав имитаторы, математически рассчитать физические процессы, отрегулировать и снять измерения, происходящие при движении торпеды. Для проведения таких исследований потребовался бассейн, снабженный необходимым оборудованием. Улучшили параметры электродвигателя, изменили ширину и толщину лопастей гребных винтов. При помощи математических расчетов старались получить max полезного сигнала, который с большой долей вероятности корректируя курс торпеды, выводил её на цель. Чувствительность, отношение электрического напряжения к звуковому давлению магнитострикционного гидрофона сравнительно низкая и составляет величину порядка нескольких единиц мкВ/бар. Чувствительность зависит от материала, из которого выполнен гидрофон, от геометрических размеров, числа витков намотанных на никелевых пластинах. Низкая избирательность гидрофонов и слишком малый сигнал от цели заставлял вести поиски. Аппаратура самонаведения должна срабатывать от сигналов кораблей – целей, превышать уровень напряжений, создаваемый шумами самой торпеды. Разрабатывая носовую часть торпеды пытались плоский обтекатель заменить на круглый разместив два гидрофона в воронкообразном экране позволяющем снизить собственные шумы винтов торпеды, воздействующий на гидроакустические преобразователи магнитострикционного типа. Выпускали две разновидности G7es/T V Zaunkonig с плоским носом и круглым вытянутым. При крене торпеды изменялся полезный сигнал, торпеда теряла цель. Исследования параметров несимметричных автоколебаний торпеды на её удалении от цели с релейными характеристиками позволили улучшить динамику самонаведения. Спешка, большие потери подводных лодок не дали довести эти изыскания до завершения, они продолжались до конца войны. Частотные характеристики позволили настроить контура усилителей, детекторы, балансный мост, автоматическую регулировку усиления и выдать на поляризованное реле разность напряжений от двух гидрофонов смещенных на некоторый угол относительно оси торпеды. Поляризованное реле при равенстве напряжений в равносигнальной зоне от гидрофонов не создает в обмотках магнитный поток. Якорь реле находится в нейтральном положении. Поляризованные реле отличаются от обычных тем, что срабатывает якорь лишь при разности напряжения и ток в реле протекает в определенном направлении. Возникающий в обмотке магнитный поток отклоняет якорь реле, замыкая контакты, задает направление на перемещения вертикальных рулей торпеды к цели. Команды поступающие на релейно - испольнительную схему , передаются на систему управления, перемещая распределительный золотник рулевой машины. Вертикальные рули торпеды перекладываются в сторону нахождения цели. Торпеда, управляемая самонаведением изменяет курс движения до тех пор, пока ее ось не будет направлена прямо на цель. При этом результирующее напряжение, от гидрофонов становились равным. Цель и торпеда выводились на равносигнальное направления. Поляризованное реле выключалось, якорь возвращался в нейтральное положение и по команде руль торпеды переводился на продольную ось в среднее положение. Торпеда, автоматически корректируя курс, удерживала движение встречи с целью. Направленность самонаведения равносигнального приемника и её характеристики зависят не только от конструктивного выполнения магнитострикционного гидрофона, но и от рабочей частоты уменьшающий полезный сигнал и радиус дальности действия магнитострикционного преобразователя в морской среде. Выбрали оптимальную частоту, при которой обеспечивается наибольшая дальность действия. Влияют и температуры, плотности, солености, давления морской воды. Все эти параметры переменные и меняются как по времени, так и в пространстве. Рассчитать, учитывая все параметр, меняющиеся во время движения в морской среде невозможно. Температурный параметр вызывает изменение скорости звука при переходе из одного слоя в другой и как следствие искривление траектории звукового давления на гидрофон. Теория поглощения и рассеивания звука в морской среде ещё недостаточно изучена. Причиной этого является неоднородность морской среды, содержащая обильное количество мельчайших микроорганизмов, взвешенных частиц . Оказывают влияние и взрывы глубинных бомб, скорость противолодочного корабля его курс к подводной лодке, турбулентность кильватерного следа от лопастей вращающихся гребных винтов.
Осенью и зимой вследствие охлаждения воды у поверхности скорость звука возрастает, дальность действия прослушивания шумов гидрофонами увеличивается. Введя улучшения в усилительные блоки, удалось довести обнаружения цели в радиусе 300 - 450 метров зависимые от температуры, волнения моря, скорости цели. К августу 1943г. изготовили 80 торпед Т V Zaunkonig. Они должны были использоваться против эскортных кораблей, охраняющих конвой, и дать возможность подводной лодке атаковать торговые суда. Рабочая частота, на которой работала аппаратура самонаведения, была 24,5 кГц. Торпеда должна была поражать цели, идущие на скорости 10 – 18 узлов. В сентябре 1943г. немецкие подводники группы Leuthen использовали эти торпеды против объединенных конвоев ON. 202 и ONS. 18. Подводные лодки U270. U952. U666. U305 повредили фрегат , его не ремонтировали, потопили фрегат, корвет Великобритании, канадский эсминец , применив торпеды T V с усовершенствованной системой самонаведения. Торпеда имела тот же калибр 21” , длину 7,163 метра, вес 1495 кг, скорость 24 узла, дальность 5700 метров, несла боезаряд 274 кг, имела неконтактные взрыватели КНВPi 4, на боевой взвод взводимые после прохождения 400 метров. Рабочее напряжение батареи составляло 104 – 106V, ток 720А. Мощность доходила до 75 -76кВт. Аппаратура самонаведения имела 11 электронных ламп, 26 реле, 1760 контактов соединяли аппаратуру самонаведения. Затрачивалось на соединение самонаведения 330 метров провода.
|
|
|
|
Торпеду модернизировали в 1944г. Поставили переключатель напряжения, который позволял при скорости 20 узлов иметь дальность 7000 метров, при скорости 23 узла дальность составляла 6000 метров. Боезаряд такой торпеды был 260 кг ВВ, в конце 1944 г. ставили взрыватель KHB Pi5. Описание торпеды на www.ubjatarchive.net/U-371 INT.htm в отчете военнопленных о торпеде T V с U371, есть схема торпеды.
В 1944г. пытались создать торпеду Т X Lerche управляемую оператором с подводной лодки по кабелю. Телеуправляемая многожильным кабелем с подводной лодки торпеда захватывала цель , наводилось самонаведением в режиме поиска. В головной части T X Lerche на основании воронки изготовленной из губчатой резины устанавливался кольцевой вибратор, работающий с частотой 35 кГц , который по максиму обнаруживал акустический шум в пределах сектора. При совпадении максимума сигнала с линией соединяющей торпеду с целью срабатывала аппаратура самонаведения осуществляющая перекладку рулей на цель. Электродвигатель обеспечивал торпеде бесследность движения и позволял без всплытия скрытно атаковать цель по командам управления. Результат был не очень хорошим, на вооружение T X Lerche не поступила. В книге ( 6 ) дана структурная схема аппаратуры самонаведения работающая по равносигнальному методу с коммутацией сигналов. Такая приблизительна схема стояла на последних торпедах Т V, Т XI. В торпеде Т XI имелся акустический датчик, настроенный на характеристику частоты гребного винта, исключающий срабатывание взрывателя под акустической ловушкой. Новая конструкция малошумящих ходовых винтов позволила обеспечить низкую шумность торпеды, это позволила увеличить радиус самонаведения на корабль – цель. Торпеда Т XI могла запускаться с новых торпедных лодок XXI серии с глубины 50 метров. В боевых действиях эта торпеда не применялась, хотя результаты испытания были обнадеживающими. В самом методе равносигнальной направленности пассивных самонаводящихся торпед существует «мертвый угол», в пределах которого система самонаведения не срабатывала. Такой угол уменьшался при сближении торпеды с целью, так как возрастает сигнал и поэтому срабатывание аппаратуры происходит при меньших углах. Изменение напряжения на выходе приемно-усилительного устройства имеет вид релейной характеристики с переменной зоной нечувствительности. Релейно - испольнительная схема отключая прибор курса перемещает вертикальные рули торпеды с запозданием. В этом положении руль находится до тех пор, пока не сработает гидрофон противоположного сектора, переводящий руль, к цели. Торпеда , идя змейкой, проходит сектор + 0< > 2 градусов с перекладыванием рулей вправо - влево в зависимости от сигналов, получаемых от гидрофонов. Система самонаведения заменяется двумя эквивалентными звеньями, одно звено осуществляло связь между гидрофоном и вертикальными рулями торпеды, а другое звено с запаздыванием не реагирует на «мертвый угол». Такая программа работает на малых расстояниях торпеда - цель. Перекладывание рулей происходит одно за другим время нахождения рулей в среднем положении min. Таким образом, прослушивается и управляется рулями весь спектр от + 00 до + 300 и - 00 до -300.
Акустическими торпедами, потоплено и повреждено около 70 кораблей, точных данных нет и их невозможно узнать, из - за потопленных подводных лодках, унесших вмести с экипажами на морское дно эти сведенья. В марта 1944 г. в Неаполитанском заливе легкий крейсер Великобритании Penelope водоизмещением 5270 тонн получил попадание акустической торпеды с U410 и через 10 минут затонул - погибло 417 членов команды. 29 мая 1944 г. U549 потопила американский конвойный авианосец Block Island, затем сторожевой корабль Barry, повредила одной T V. Корабль E. E. Elmore уклонился, от акустической торпеды. Вскоре U549 была потоплена тремя залпами бомбометов с эсминца Arens. Эта продолжалось, до окончания беспощадной войны подводных лодок против конвоев. Многие ссылаются на скромные показатели попадания для таких дорогостоящих торпед. Из диапазона атаки выпадали слишком тихоходные суда и быстроходные эсминцы. В список атакованных, попадали и подводные лодки, торпеда могла возвратиться и потопить субмарину. Ловушка «Foxer» , наводила самонаводящуюся торпеду на себя, спасала корабль от потопления. Ожидание немецких разработчиков от многообещающих пассивных самонаводящихся торпед не оправдались. Преждевременное срабатывание взрывателя торпеды, огромное количество естественных помех и их влияние на работу гидрофона приводили к промаху, преждевременному взрыву в кильватерном следе. Влиял на отказ индукционный взрыватель не срабатывающий при большой глубине прохождения торпеды под корпусом .
Самонаводящаяся акустическая электрическая торпеда должна своими гидрофонами захватить цель. Для этого прибор управления торпедной стрельбы вводил данные в торпеду при помощи вращающихся шпинделей пристыкованных к системе управления торпеды. Данные вводились в торпеду торпедистам без извлечения её из торпедного аппарата. Устанавливалась глубина хода, угол поворота на боевой курс. Прибор управления торпедной стрельбы ПУТС усовершенствовали в 1942г. он стал электромеханическим. Через электрический кабель вводили в приемные приборы значения и сервомоторы при помощи шпинделей устанавливали данные учитывая: дистанцию до цели, длину цели её курс собственную скорость субмарины и пеленг на цель скорость хода торпеды. Из боевой рубки осуществлялся пуск, выводящий торпеду с углом поворота при пуске в точку встречи её с целью, или в радиус захвата гидрофонами которые, корректируя курс, захватывали аппаратурой самонаведения цель. Усовершенствование уменьшило временной интервал от внесенных данных от ПУТС , до пуска торпеды с подводной лодки. При стрельбе существуют техническое рассеивание по курсу, эти погрешности создает кордонный подвес волчка гироскопа. Величина этой ошибки зависит, под каким углом происходит движение торпеды в горизонтальной плоскости и как торпеда накренена, под каким углом крен. Существенно возрастает широтная ошибка гироскопа с тремя степенями свободы, это описано в литературе (1). Применяя торпеды в различных морских театрах в северных, южных широтах следует учитывать скорость вращения горизонта, она разная, к тому же и в разных направлениях. Разумеется, прибор торпедной стрельбы должен учитывать все перечисленное, но все изменения курса, ошибки, технические сбои просчитать невозможно. Торпеды Т V Zaunkonig были обнаружены 4 июля 1944г. на захваченной подлодке U505 американцами, на субмарине их было две. Одна из этих торпед в экспозиции в Чикагском музее науки и промышленности. Войдя в First acoustic torpedo и найдя сайт http://www.ibiblio.org/hyperwar/USN/rep/ASW-51/ASW-15.html HyperVVar.Antisudmarine VVorld VVarII Chapter 15 можно ознакомится, с методами противодействия немецкой акустической торпеды. Три торпеды были обнаружены на борту U250 потопленной в проливе Бьорке-Зунд малым охотником МО-103. Близость потопленной подлодки к главной базе Кронштадт и небольшая глубина позволили поднять субмарину и в сентябре 1944г. в Кронштадте изучить германскую подводную лодку. Минно-торпедное управление ВМФ исследовало германские торпеды. Это позволило после войны разработать и принять на вооружения ВМФ СССР торпеду САЭТ-50 с радиусом реагирования системы самонаведения 600 – 800 метров, с дальностью хода 4000 метров при скорости 23 узла с акустической системой наведения. В 1955 г. на вооружение приняли модернизированную торпеду САЭТ – 50М, имевшую скорость 29 узлов, дальность хода 6000 метров. С приказом об изучении германской подводной лодки U250 и определении дальнейшего её использования, номер 824 от 6 ноября 1944г. читатель может ознакомиться на www.town.ural.ru/ship/start
|
|
|
|
Писатели-моринисты в основном занимаются статистикой морского вооружения. Может со временем этот пробел о разработке самонаведения, тернистых трудностях стоящих перед конструкторами будет подробно описан и читатель узнает о разработчиках, конструкторах, технологах самонаводящихся торпедах. Дело за историками, которые должны описать более подробно создание этих торпед. Во время Второй мировой войны подводные лодки США на бескрайних просторах Тихого океана использовал 14748 торпед , торпедоносная авиация 4919. Около 33% из выпущенных торпед попали в цель, это один из лучших показателей их применения. Одной из типов торпед, применяемых в войне, была авиационная противолодочная самонаводящаяся торпеда Mk-24 Fido. Осенью в 1941г. ВМФ обратился в исследовательский комитет с заявкой на разработку авиационной противолодочной электрической торпеды. 19 декабря 1941г. провели совещание, где рассмотрели вопрос о разработке такой торпеды. На втором совещании были оговорены параметры, которые бы устроили заказчика. Размеры и вес, как у торпеды Mk-13, глубина погружения торпеды 50 футов, батарея свинцово – кислотная, время работы электромотора ориентировочно 15 минут. В декабре были определены подрядчики, которые приступили к предварительной разработке такой торпеды. Гарвардская лаборатория подводного исследования должна была разработать пассивную акустическую аппаратуру самонаведения с размещением её в торпеде. Bell Telephone Labs изготовить эту аппаратуру и испытать. Westeern Electrik поставить аккумуляторы и обеспечить ход торпеды. General Electrik – установить электродвигатель , систему управления, рулевое устройство и состыковать всё это. Дэвид Тейлор - провести испытания в бассейне и дать свои рекомендации.
Исследования и изготовление пьезоэлектрического гидрофона, подтвержденные расчетами, подтвердились. Сделать авиационную противолодочную самонаводящуюся торпеду стало возможным.
|
|
|
|
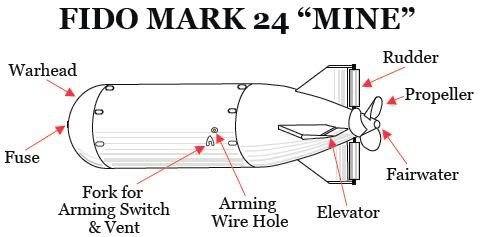
В приведённой схеме торпеды Mk-24 Fido видны такие гидрофоны, их расположение в торпеде за боеголовкой и аппаратурой самонаведения, затем аккумуляторная батарея, электродвигатель, трёх лопастной винт, управление рулями от электродвигателей постоянного тока. Расчеты и испытания показали: батарея способна дать скорость 12 узлов, электродвигатель работать 15 минут.
Гидрофоны, расположенные под углами 00 и 1800 управляли горизонтальными рулями, перекладывая их вверх - вниз, гидрофоны с углами 900 и 2700 вертикальными рулями, перекладывая их вправо - влево. Четыре пьезоэлектрических гидрофона работали на частоте 24 кГц, подавая сигналы с выхода на усилители. Расположили их за боезарядом, который срабатывал от контактного взрывателя при ударе о корпус подводной лодки. В январе 1942г. Bell Telephone Labe представила торпеду заказчику. General Electric продемонстрировал рулевое управление и двигатель торпеды. Были изготовлены аккумуляторы, их соединили в батарею, которая давала 48 V. Всю аппаратуру разместили в корпусе, и в июне 1942г. образец торпеды был поставлен в Дэвид Тейлор для проведения испытаний в бассейне.
|
|
|
|
Проведённые испытания дали положительные результаты. Исследования и настройка позволили совместить электрическую часть с рулями, отрегулировать аппаратуру самонаведения. Существующий корпус торпеды Mk-13 был изменен, уменьшили диаметр, сократили длину, снизили вес. Электродвигатель мощностью 3,7 кВт в 5 л.с. дал дальность 4000 ярдов. Торпеда имела в диаметре 19”, длина составила 84”, вес 680 футов, боезаряд 92 фунта ВВ, «торпекс». Торпеда осуществляла поиск подводной лодки с погружением по кругу при сбросе её с самолета. Первый образец торпеды был настроен на глубину 50 футов. Затем в ходе испытания глубину поиска довели до 150 футов. Сброс такой торпеды осуществлялся с высоты 200 – 300 футов на скорости 120 узлов. 7 декабря 1942 г. на полигоне вблизи Бостона был осуществлен первый сброс торпеды Mk-24 Fido. Относительно малая скорость торпеды держалась в тайне. Подводная лодка при атаке такой торпеды могла выйти из зоны поражения. Производство и выпуск осуществляли Western Electric вмести с General Electric, который поставлял электромоторы и рулевое управление. В мае 1943г. первые 500 торпед были поставлены ВМФ. Первая подводная лодка U640 была потоплена в мае. Первоначально был выдан заказ на производство 10000торпед. Он был пересмотрен, и всего изготовили 1800 торпед. В целом прошло 17 месяцев от выдачи заказа до изготовления и потопления немецкой U640. Торпеду применяли не только флот США, но и британские и канадские вооруженные силы.
|
|
|
Общее количество израсходованных торпед
|
340
|
|
Количество торпед , примененных против подводных лодок
|
142
|
|
Количество лодок, потопленных торпедой
|
31
|
|
Количество поврежденных
|
15
|
|
Количество торпед, использованных британским и канадскими флотом
|
62
|
|
Потопленных лодок
|
6
|
|
Поврежденных лодок
|
3
|
|
Общее количество потопленных лодок
|
37
|
|
|
|
Торпеда Mk-24 Fido на вооружении ВМФ США находилась до 1948 г.
Торпеда Mk-27 mod 0. Cutie была разработана в 1943г. Bell Telephone Laboratories. Аппаратура самонаведения в основном была с торпеды Mk-24. По замыслу разработчиков она должна была использоваться с подводных лодок против японских противолодочных кораблей охранения в прибрежной мелководной зоне. С такими торпедами подводная лодка, получала возможность оборонятся, от кораблей охранения. Торпеда имела диаметр 19”, длина была 90”, вес 720 фунтов, боезаряд 95 фунтов, скорость 12 узлов, дальность 5000 ярдов, электромотор, работал 12 минут, вращая один винт. Таких торпед было изготовлено немного: около 1000. Делали их Electric Corporation вмести с Kearney и Hj. Торпеда имела гироскоп, и он управлял начальным курсом при движении ее к цели. Курс задавался счетно-решающим устройством , управлял торпедой на начальном прохождении к цели, с учетом скорости корабля и торпеды, пеленга атакованного корабля и субмарины. Угловой прибор позволял устанавливать угол гироскопа в любую сторону, это позволяло стрелять залпом – веером с поворотом стреляющей подводной лодки выводя торпеду на курс, встречи с кораблем. Четыре гидрофона расположенные по окружности торпеды в средней части обнаруживали цель во всех направлениях. При захвате цели гидрофонами с углами 90 и 270 градусов аппаратура самонаведения анализируя сигналы с правого и левого гидрофона, перекладывала вертикальные рули, направляя торпеду в сторону сильного сигнала . Сигналы от гидрофонов усиливались усилителями постоянного тока и задавая напряжение на потенциометры передавались на управляющие электромоторы вертикальных рулей наводя торпеду на корпус корабля цели. При уменьшении сигнала с левого и правого гидрофона равновесии напряжения, рули возвращались в исходное состояние на продольную ось торпеды. Фиксированное управление глубиной хода торпеды на начальном прохождении торпеды, задавал прибор управления торпедной стрельбы, обеспечивающий глубину хода внося данные в гидростатический прибор. Сигналы гидрофонов с углами 0 и 180 градусов передавали управление на горизонтальные рули, отключали гидростат глубины хода торпеды, перекладывая горизонтальные рули вверх, вниз. Сигналы с гидрофонов блокировались в целях безопасности, если торпеда опускалась, ниже заданной глубины, уходила вниз. Гидростат, восстанавливал глубину хода торпеды, до задаваемой при начальной установке для повторного поиска цели. Торпеда, заглубляясь и всплывая, управляемая гидростатическим прибором и сигналами с гидрофонов выводилась на корпус противолодочного корабля, имела контактный взрыватель. Mk-27 mod 0. Cutie с диаметром 19” запускалась из кормовых торпедных аппаратов 21” используя деревянные вставки. Mark 27 Torpedo можно увидеть heroicrelics.org/codia/torpedo-mk-27/index.html Сжатый воздух под большим давлением при пуске выталкивал торпеду из торпедного аппарата. Торпеда выходила при пуске в облаке из пузырьков воздуха, выходящих на поверхность. Этот воздух указывал место подводной лодки. Имея малую скорость и дальность хода, самонаводящаяся пассивная электроторпеда Mk-27 mod 0. Cutie использовалась как оружие самообороны из кормовых торпедных аппаратов навстречу преследующему противолодочному кораблю. Торпеду выпускал Western Electric, и её поставляли ВМФ США с июня 1944г. Как и все новые торпеды, она имела серьезные ограничения в применении против эскортных кораблей. Представлял подводникам торпеду Картер Беннет, который в боевом походе демонстрировал её возможности. Торпеда осенью 1944г. в Желтом море потопила сторожевой корабль. Вблизи Нагасаки торпеда Mk-27 mod 0. Cutie повредила патрульный катер, электроторпеда Mk-18 , отправила патрульный катер на дно. Вскоре Беннет обнаружил эсминец, были выпущены две торпеды Mk-27 mod 0. Cutie, они не попали в эсминец. После доклада командующему подводными лодками Чарльзу Локвуду решили применить торпеды, хотя испытания и были «пятнистыми». Были попытки довести торпеду, улучшить характеристики, повысить скорость. Израсходовали 106 торпед , потопили 24 корабля и повредили 9. После войны торпеда была модернизирована, получила развитие как Mk-27 mod 4, в 1960г. была заменена на торпеду Mk-37.
Последней торпедой, пассивной самонаводящейся, изготовленной в 1945 г., была торпеда Mk-28. Она несла аппаратуру пассивного самонаведения в модернизированной торпеде Mk-18, которая была разработана на основе германской трофейной G7e. Торпеда имела один винт, это позволила снизить шум от самой торпеды. В носовой части разместили пьезоэлектрические гидрофоны позволяющие создать, пассивную двухплоскостную систему самонаведения с электрическим управлением рулями. Удалось создать и установить гироскоп и контроль глубины управляемый электрической энергией, отказавшись от пневматических средств управления. В 1945 – 1952 гг. торпеда изготавливалась, постоянно модернизировалась, оставаясь на вооружении до 1960 г. Торпеда имела вес 2800 футов, диаметр 21 дюйм, длину 20 футов 6 дюймов, скорость 19,6 узлов, дальность 4000 ярдов, имела боеголовку Мк 28 mod 2 весам 585 футов, взрыватель Мк 14 mod 2. Система пассивного самонаведения включалось по прохождению 200 – 2500 метров. Батарея свинцово–кислотная. «Вестингауз», Westinghouse Electric Corp. Пенсильвания сделал 1750 торпед Mk-28. Она не применялась в боевых действиях, хотя и в некоторых источниках говорится о её применении, это сомнительно война закончилась.
|
Список Литературы:
|
1. В.И.Марисов, И.К.Кучеров. Управляемые снаряды. Воениздат 1959.
2. С.Н.Красильников. Атом и оружие. Воениздат 1964.
3. Г.М.Подобрый, В.С.Белобородов и др. Теоретические основы торпедного оружия. М. 1969.
4. С.Т.Рабинович. Торпеды. ДОСААФ.1957.
5. В.А.Сычев. Корабельное оружие. ДОСААФ.1984
6. В.Л.Дородных, В.АЛобашевский. Торпеды. ДОСААФ.1986.
7. Ю.Роувер. Субмарины, несущие смерть. Центрополиграф. 2004.
|
На главную
|
© HeleonPrime 2010. Все права защищены.
|
|